About our team
The Delft Mercurians team was formed in September 2022, as a project from the Robotics Student Association in Delft. We currently have 21 members, meeting regularly and working on all aspects of the project, including management, software, hardware and electronics. We are a multicultural and multidisciplinary team, with many Dutch and international students in Robotics, Computer Science, Nano-biology, and more.
We aim to participate in the 2024 RoboCup competition in Eindhoven, and we are working hard to get the robots ready !
Want to join the team ?
ApplyVision
After decades of competition, all the robots in the RoboCup Small Size League have converged to similar designs, and innovation has stagnated. Without innovation, there is no progress. And without fresh ideas and change, there is no innovation. Robots have endless possibilities, yet they are chained by what’s already been done before. There need to be new challengers to bring in fresh ideas, to stir up the competition, and to inspire a new generation of robot enthusiasts. We aim to be that catalyst. Our goal is to think outside of the cylinder, to not fall into the current design trend, and create robots that are unique, fun, Mercurian.
We are a part of the Robotics Student Association, an association focused on advancing robotics through student projects and events.
![]()
Sponsors
GHz
![]()
![]()
MHz
![]()
![]()
kHz
![]()
![]()
![]()
![]()
Partners
![]()
Collaborators
![]()
![]()
![]()
RoboCup
RoboCup is an international robotics competition, whose main focus is an annual robot football competition. It aims to promote science and engineering research, with the ultimate goal being to develop robots that can beat human players :
By the middle of the 21st century, a team of fully autonomous humanoid robot soccer players shall win a soccer game, complying with the official rules of FIFA, against the winner of the most recent World Cup.
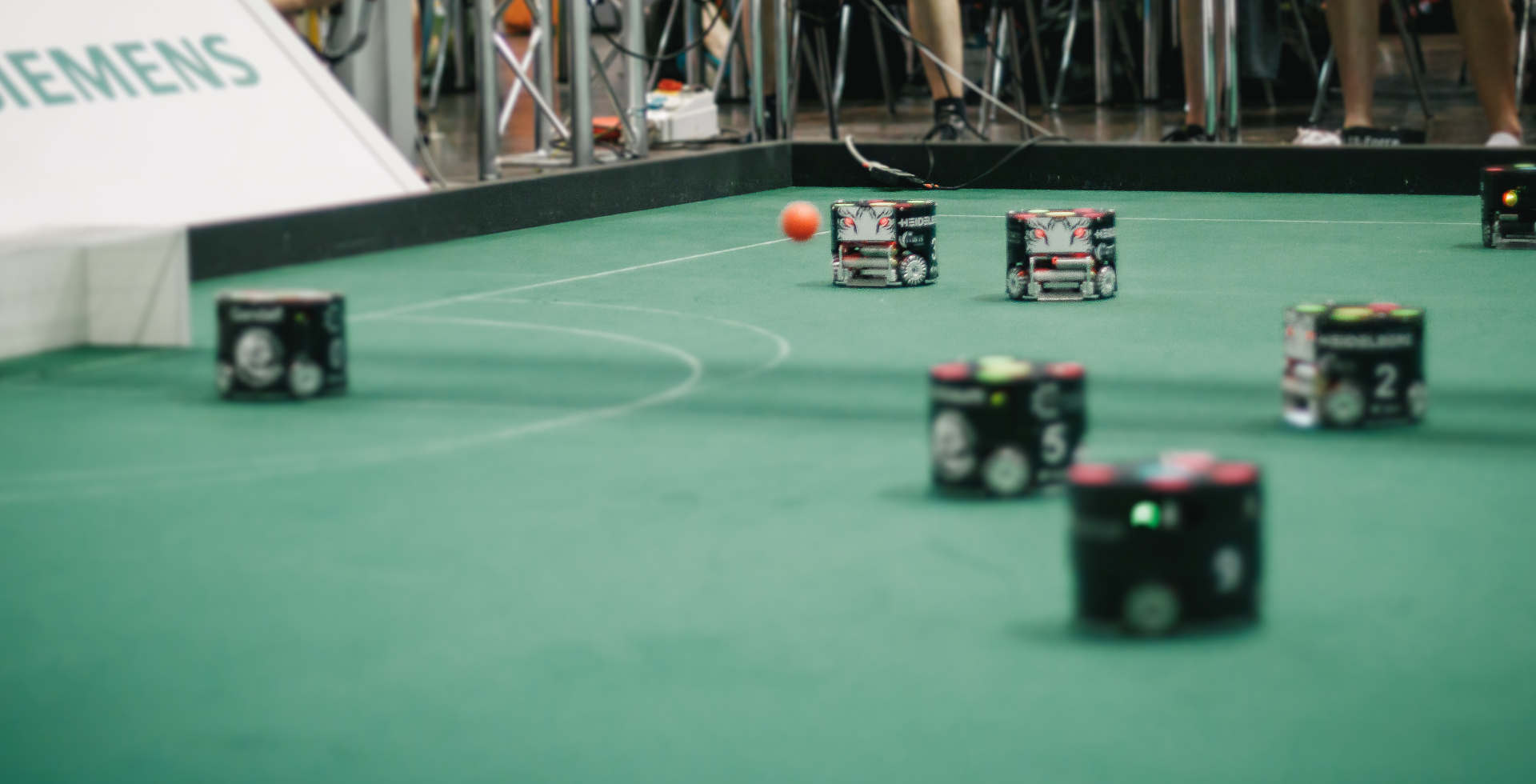
We are competing in the Small Size League, in which teams of 6 robots compete against each other in 10-minute matches.
RoboCup Small Size League robot soccer focuses on the problem of intelligent multi-agent cooperation and control in a highly dynamic environment with a hybrid centralized/distributed system.
Each robot must conform to the dimensions as specified in the F180 rules: the robot must fit within an 180 mm diameter circle and must be no higher than 15 cm. The robots play soccer with an orange golf ball on a green carpeted field that is about 12 m long by 9 m wide.
All objects on the field are tracked by a standardized vision system that processes the data provided by multiple cameras that are attached to a camera bar located about 4 m above the playing surface.
Building a successful team requires clever design, implementation and integration of many hardware and software sub-components into a robustly functioning whole making Small Size robot soccer a very interesting and challenging domain for research and education.
- From the Robocup website